


平面移動における、究極の自由度。
ハードウェアエンジニアが語る、
TriOrbの移動機構から見える未来。
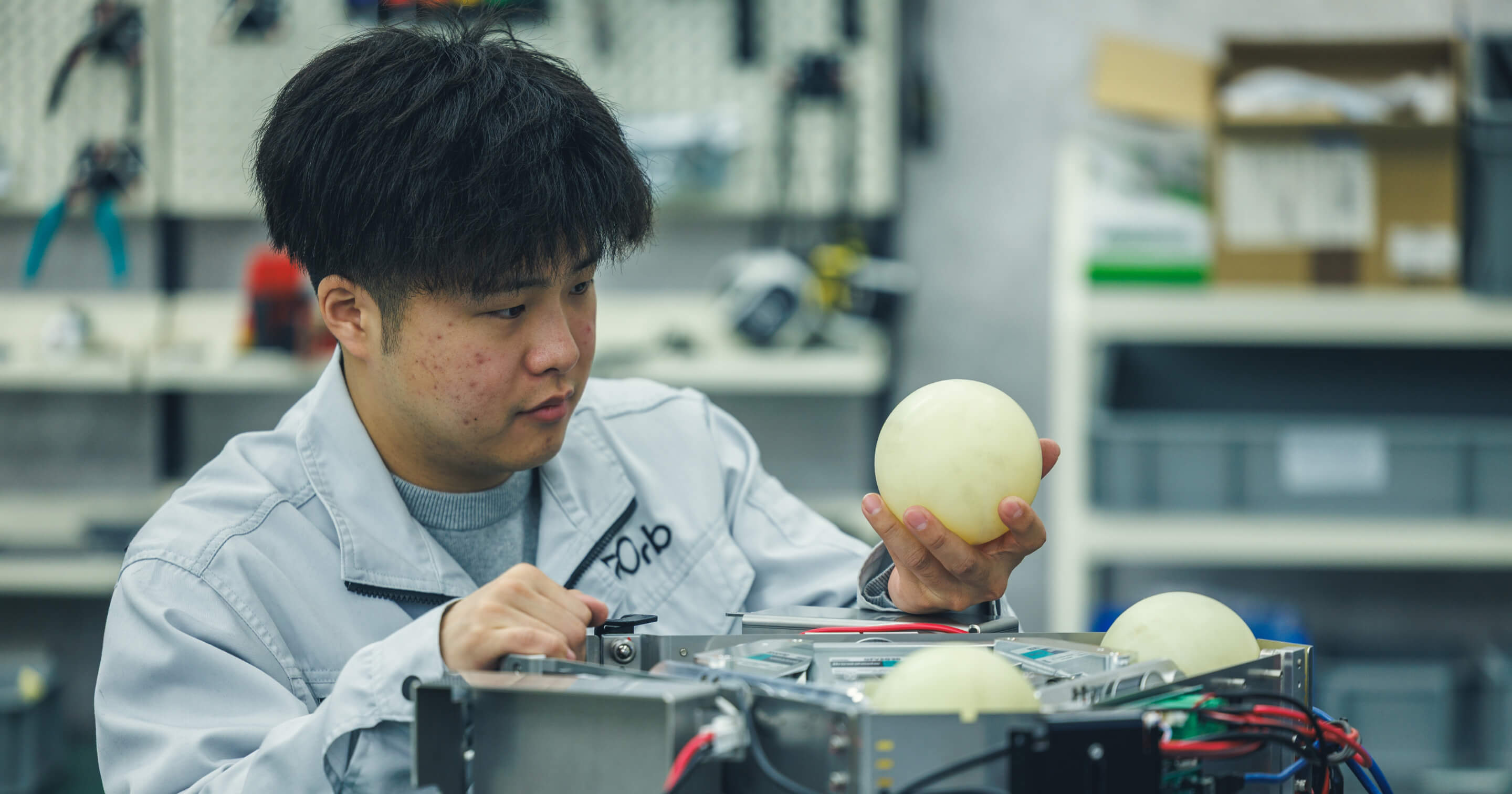
中村 充宏
製品開発部 ハードウェアエンジニア
半導体製造装置メーカーにて、全自動加工装置の設計や生産工程管理を担当。2026年2月、TriOrbに入社。製品開発部にて量産化に向けた施策・開発等を担当。
前職の仕事と、TriOrbに入社した理由・経緯
0から1を経験できる場所が、ここにあった。
前職は半導体製造装置メーカーで、社内設備の設計改善や全自動加工装置の設計を主に担っていました。ものを扱う現場では、AGV(無人搬送車)で重いものを運びたいという課題が常にあります。しかし、既存の技術では実現できないことが多く、そのもどかしさを感じていました。
そんな中でTriOrbの存在を知り、「0から1を作っていくフェーズを経験できる」という点に強く惹かれました。
実際にオフィスで実機を触らせてもらいましたが、TriOrbの球駆動は、なぜその動きが実現できているのかすぐには理解できなかった。一方で、3つの球で全方向に動けるシンプルさと、圧倒的な自由度。その組み合わせに、心を掴まれ、入社を決めました。
TriOrbの「面白さ」を一言で
平面移動における、究極の自由度。
TriOrbの技術的な面白さをエンジニア視点で言うと、平面移動での究極の自由度を実現しているところだと思います。ドローンは「空間」において最大の自由度を持った移動体です。一方で、地上のロボットで、「平面」においてそれに近い自由度を実現しているものはあまりありませんでした。TriOrbの技術は3つの球でシンプルに全方向移動ができて、しかも部品点数が少ないことも特長です。
前職の現場でよく見かけたオムニホイールは、構造が少し複雑で壊れやすい面もあったのですが、そういった課題も球駆動なら克服できると感じました。
また、産業の現場だけにとどまらない、将来的な拡張性も魅力だと思います。例えば、人型ロボットがよく注目されますが、私は「ロボットの足は二足歩行にこだわる必要はない」と思っています。この機構が自律移動のプラットフォームとして確立されれば、「足」としてのスタンダードになっていく。そんな未来が想像できるほど、この機構の可能性は広い。それが、エンジニアから見たTriOrbの面白さです。


入社後に感じたギャップ
世の中のいいものを、どんどん取り入れていく。
入社してみてのギャップは、正直あまりありません。ただ、一番新鮮に感じたのは、外にある良いものを積極的に取り入れる雰囲気があることです。
AIや新しいツールの情報がチャットに流れてきて、リスクを見ながら積極的に試していく。アイデアがあれば提案しやすく、良いと判断されればすぐに動き出す。そのスピード感には、入社してすぐに驚きました。技術の進化が速い今の時代に、こういう姿勢で動ける組織は強い。エンジニアとして、純粋に面白いと思える環境がここにあります。
こんな人と働きたい
「何が良くて何が悪いか」を、自分の言葉で語れる人。
機械が好き、ものづくりが好き、技術が好き。そういう人と一緒に働きたいです。趣味のレベルでもいい。私自身、バイクのオーバーホールをやったり、PCを自作したり、3Dプリンターを家に置いていたりするので(笑)、そういう人とは自然と話が合うと思います。
ただ、それ以上に大切だと思っているのは、技術者として「何が良くて何が悪いか」を自分の言葉で語れるかどうかです。TriOrbのメンバーを見ていると、ものづくりへの愛着を超えて、「世の中のために実装したい」という思いで動いている人が多い。そのためには、あらゆる技術の良し悪しを自分の言葉で見極めていく力が必要です。何かを作り、それが実際に社会で使われていく。そこに向けて一緒に手を動かしていける人と、一緒に働いていきたいと思っています。
TriOrbの「人」
インタビューの一覧
-
先行開発部 リーダー
熊谷 和樹

異端のハードとの融合で、ソフトウェアの限界を突破する。気鋭のエンジニアが挑む、未開拓領域。
先行開発部 リーダー
熊谷 和樹

-
製品開発部 ハードウェアエンジニア
中村 充宏

平面移動における、究極の自由度。ハードウェアエンジニアが語る、TriOrbの移動機構から見える未来。
製品開発部 ハードウェアエンジニア
中村 充宏
-
事業戦略部 リーダー
久保﨑 勝也

現場の「仕方ない」を「できる」に変える。製造業の現場を知り尽くした営業が語る、TriOrbにしかできない新たな提案。
事業戦略部 リーダー
久保﨑 勝也

-
経理総務部 部長
寺井 優

「自分がつくったルール」が、「会社のルール」になっていく。世界に挑む組織をコーポレート部門から創る面白さ。
経理総務部 部長
寺井 優

-
最高研究責任者(CRO)
冨永雄一

基礎研究から社会実装へ。材料系研究者がTriOrbで見つけた、技術と社会をつなぐ仕事。
最高研究責任者(CRO)
冨永雄一

-
事業戦略部 部長
稲吉 亮太

「移動OS」の刷新で、日本の産業構造を塗り替える。外資系コンサルから転身した事業責任者が語る、TriOrbのポテンシャル。
事業戦略部 部長
稲吉 亮太
